I've decided to upgrade from sg90s to mg996Rs.

The servo shaft adapter requires an 8.75mm center hole, so I'll bump that up to 8.85 for clearance. 3D-printed plastic also shrinks a little. Other parameters for the 996 spur gear; Metric, 20 degree pressure angle, module = 1, #Teeth 24, backlash 0, root fillet radius .5mm, gear thickness 5mm. This is quite a large gear and the foot's gear will have to be twice as large! A 48mm foot gear is going to be too large.

OK, next attempt. Remix a servo horn from Thingiverse to mesh with the original drive gear.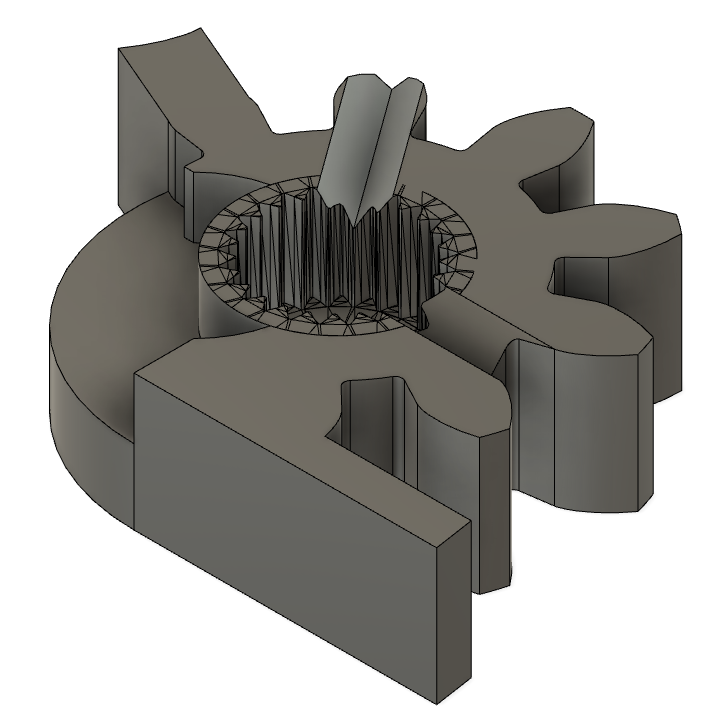
Decided to move the MG996Rs to the knee joints and 995s to the ankles. For the ankles, I set the servo driver to 800 for it to be straight. The knees were set to 2200 straight. Straight means 0-degree bend.
The horn adapter fits!/
4/13/23 UPDATE:Decided to move the MG996Rs to the knee joints and 995s to the ankles. For the ankles, I set the servo driver to 800 for it to be straight. The knees were set to 2200 straight. Straight means 0-degree bend.
Hips do not need recalibration. Calibration app:https://ai2.appinventor.mit.edu/b/3is9x
0. -
1. -
2. -
3. - Knee Recalibrated
4. ReCalibrated
5.
6.
7. Knee Recalibrated
Waiting on prints.
4/14
the foot weighs 1.8g, 2.8 with bearing.
The thigh weighs 18g with bearing.8 without.

No comments:
Post a Comment