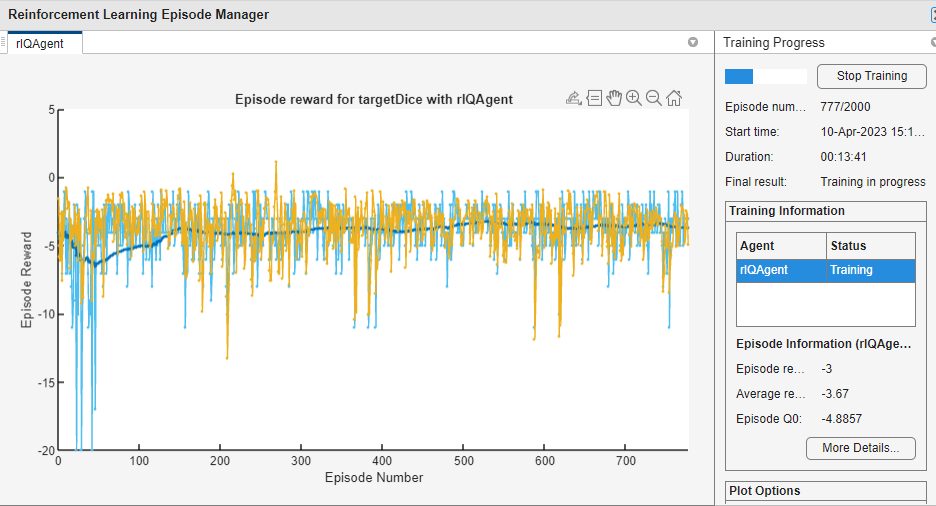
Beginning some new training. For myself too!
I have a reduced model in Fusion 360 that only contains bodies necessary for robotic linkage.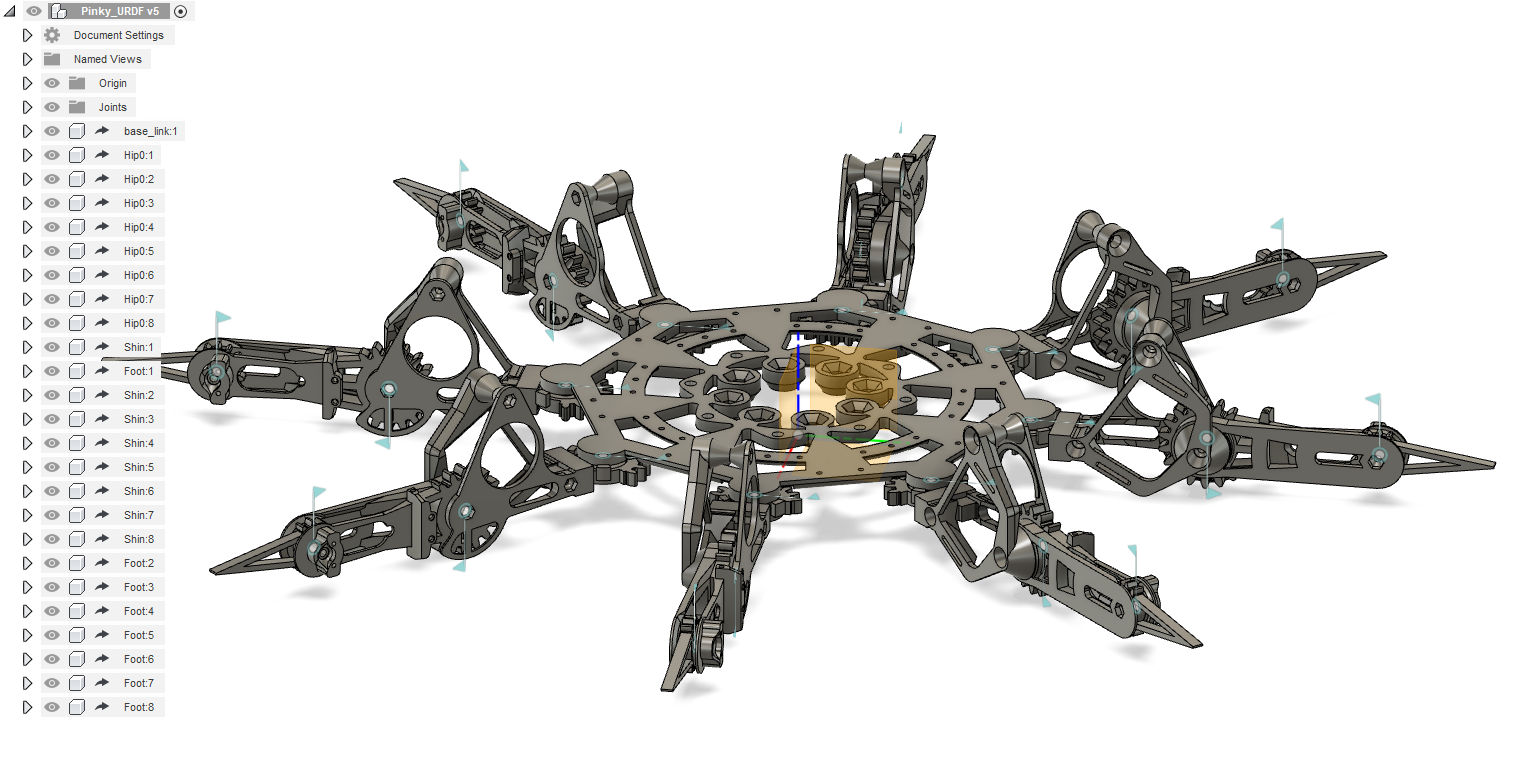 Found a fancy URDF exporter for F360 on GitHub. I had to be sure to not have nested legs, all the joints must be in the main component level.
Found a fancy URDF exporter for F360 on GitHub. I had to be sure to not have nested legs, all the joints must be in the main component level.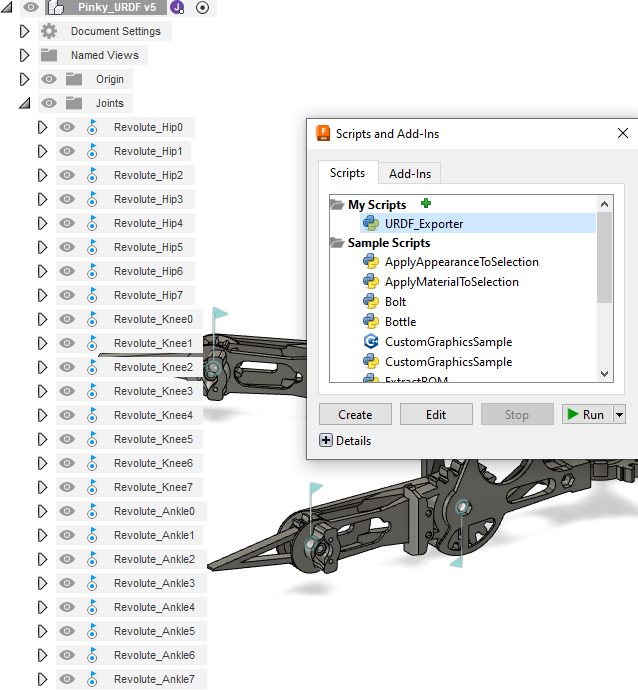 To import into Matlab, I needed the robotics toolbox add-on. To import the robot:
To import into Matlab, I needed the robotics toolbox add-on. To import the robot:
pinky = importrobot('C:\Users\jynx4\OneDrive\Documents\Pinky\urdf\pinky_urdf_description\urdf\pinky_urdf.xacro')
That throws an error: Error using robotics.manip.internal.xacroSupport.convertXacroToURDF
Unable to process Xacro content for the following reasons: "substitution args not supported:
when processing file: C:\Users\jynx4\OneDrive\Documents\Pinky\urdf\pinky_urdf_description\urdf\pinky_urdf.xacro
". Do not use roslaunch tag attributes, which can use substitution args like $(find pkg), $(arg foo), etc. For more information on
substitution args, see https://wiki.ros.org/roslaunch/XML#substitution_args
Error in importrobot (line 172)
[urdfString, pathToDataFile] = robotics.manip.internal.xacroSupport.convertXacroToURDF(parsedInput.Results.input);
To solve this, I had to delete the following two lines from the .xacro file.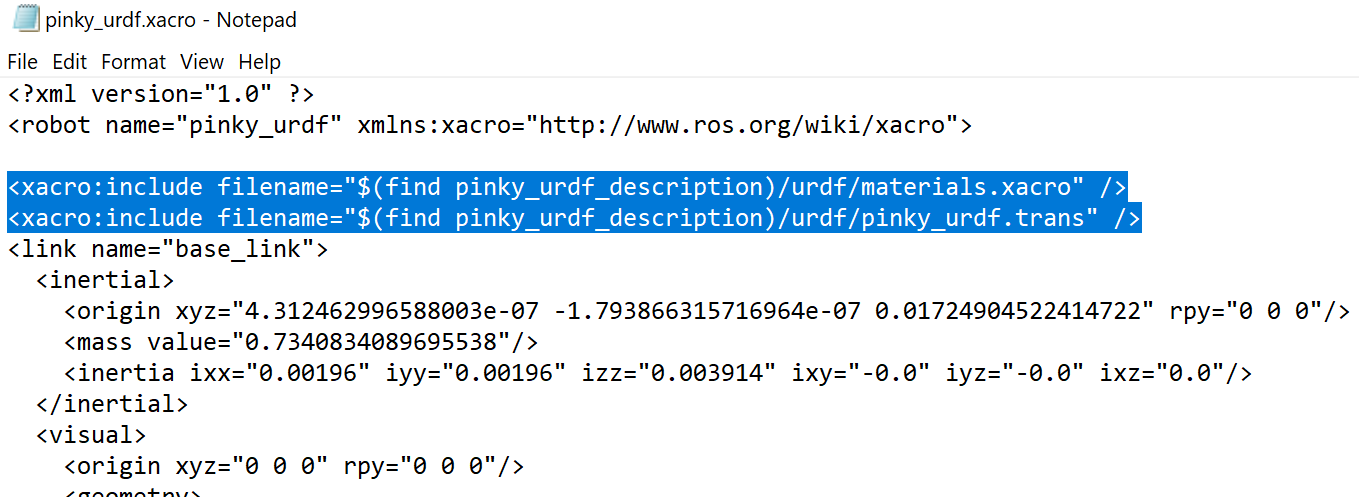 In Matlab: "show(pinky)" command gives signs of success.
In Matlab: "show(pinky)" command gives signs of success.
Youhou! i will try that! many thanks!!!
ReplyDelete