Hardware:
- N20 Miniature DC Geared Motor Encoder Geared Motor 6V 265RPM
- Adafruit DRV8871 DC Motor Driver Breakout Board - 3.6A Max
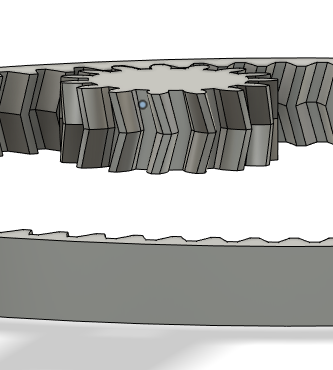
Driving the rotating assembly will be gears. I will try to design some herringbone gears in F360, so that there will be no axial slippage. I'll be trying out the GF Gear Generator plug-in.
Parameters:
Internal. Simple/Double Helical gear. 1.2mm Module, 15 Teeth, Pressure angle 20 degrees.
External: Simple/Double Internal Helical Gear. 1.2mm Module, 20 degrees PA. 100 Teeth.
The Module and Pressure angle have to match so that the gear system meshes.
Pinky/s top microprocessor is an esp32 devkit. It is connected via slip ring to the lower nano rp2040. Rx on the rp2040 is gpio1, tx is 0. Colored brown and green wires respectively.
Setting up the IMU:
https://learn.adafruit.com/adafruit-bno055-absolute-orientation-sensor/device-calibration
No comments:
Post a Comment